みなさん、こんばんは。豊橋技術科学大学から参りました岡田です。今日はこういう場にお招きいただきありがとうございます。9年前まではATRに11年間くらい在籍しておりまして、当時からIAMASという大学はよく知っていたんですけど、今回初めて訪問させていただくことができました。本当にありがたいことだと思っております。
ロボットの身体性とコミュニケーション
最初にどんな分野に興味があるかということをすこし紹介しますと、いわゆる認知科学や生態心理学という分野ですよね。心理学と人工知能のあいだにあるような、人のかしこい所作であるとか、コミュニケーションであるとか、子どもの発達のプロセスだとか、あるいは人が集まってきたときに、お互い何気なくいろんなところに座っているんだけども、こういう場の中でお互いが微視的に調整しながらある秩序立ったふるまいを作っているんですけど、そういった仕組みが面白いなということがあって、そういう認知科学周辺での仕事をいろいろしてきました。
今日のタイトルにある「弱いロボット」じゃないですけれど、ぼくも研究者としては「弱い人間」というか、認知科学や社会的相互行為論なんかのメインストリームで仕事をするとしんどいんですよね。まあ、そもそもロボットの専門家でもないし、というところもあります。それでメインストリームに走るんじゃなくて、なにか面白そうな境界領域を探そうということで、例えば、発達心理学のセンスと、認知的ロボティクスのセンスをつなぐと面白いのかなというふうに思っています。発達心理学の研究者が千人いたとして、ロボット工学の専門家が千人いたとして、そのメインストリームではなかなか科研費がとれないとか、いろんなことがあるんですけど、発達心理学と認知ロボティクスをつなぐような仕事はたぶん十分の一ぐらいの人数かもしれない。そうすると百人ぐらいのところでいろいろやれるので、すこし自由な発想もしやすいのかなと。
それから、社会的相互行為論のセンスと認知ロボティクスをつなぐと、「ヒューマン=ロボット・インタラクション」や「社会的ロボティクス」という研究になり、最近ではとても盛んになってしまったんですけど、15年くらい前に始めた頃は非常に研究者の数も少なくてやり易い分野だったんです。それから、社会的相互行為論と発達系の話をつなぐことで「学びの場のデザイン」をどんなふうに行えるか、ということも興味を持ってやっています。それと、こういう思弁的な話ばかりではなかなか難しいので、身体性認知科学や生態心理学はそもそも「身体性」ということに関わっているので、ロボットの身体というものを使って何かコミュニケーションの研究ができないか、「コミュニケーションの研究にロボットを道具として使えないか」ということをしばらく考えてきました。
(画像:どんなロボットを作っているのか?)ロボット作りに関しては、ほとんど素人です。どんなロボットを作ってきたかというと、こんな感じのロボットなんですけど、今ぼくのいる豊橋技術科学大学は、全国の高専から集まってくる学生でほぼ八割をしめるところなので、入ってきた学生は最初から電子回路が得意だったり、機構設計、SOLIDWORKSが得意だったり、プログラミングが得意だったりします。そういうなにか一芸をもった学生たちが束になるといろんなロボットが作れてしまうということがありますね。ぼくの研究室は、Interaction & Communication Designの研究室という名前で、ICD-labというふうに呼んでいます。その中でいろいろなロボットを作ってきたのですが、このロボットは〈Muu(む~)〉という、ATRのときに作ってきたロボットです。もう15年くらい前になりますね。あとは、こんな形をしたものなどを、そのときに在籍していた学生さんと作ってきました。
それから、人を揺り動かしてしまうという意味では、スタンフォード大学のフォッグ(Fogg)などは、人を説得する技術ということで、「パースエーシブ・テクノロジー」ということを言い出していたわけなんですけど、思わず他者を揺り動かしてしまうという意味ではちょっと面白いかなというわけです。ポイントは、こいつはとてもローテクなんですよね。自分でゴミを拾えないし、何もできないんだけど、ローテクなのに実現してしまっている、関わりの中で機能を発現させてしまっている。それから、先ほど言いましたように、ぼくらがゴミを拾ってあげると何となく「うれしい、いいことをした」という気持ちが湧いてくる。ぼくらは〈ゴミ箱ロボット〉を支えつつ手伝ってあげているんだけど、結果としては〈ゴミ箱ロボット〉の存在によって我々が支えられているというところがあるのではないか。こういう支えつつ支えられるという関係は、人とロボットとの共生などを考えるうえではちょっと面白い側面なんですよね。こんな議論を、この〈ゴミ箱ロボット〉だけで、実は十年以上も続けている。十年以上も続けているというのは、なかなか研究が進展しないということでもあるんですけど、まだ研究テーマとしてはいろいろとつきないんですね。
医学書院の編集者の白石正明さんが、この〈ゴミ箱ロボット〉の話を『現代思想』(Vol. 36, No.16, 2008)という雑誌で目にしていただいたようで、「一緒に本を作ってみませんか」という話になりました。その過程で、この『弱いロボット』というタイトルを付けていただいたわけです。白石さんの編集されている、医学書院の「ケアをひらく」というシリーズではいろんな立場の人が面白い本を書いているようで、これも白石さんが考えてくださった帯のコピーなんですけど、「ひとりでできないもん」「他力本願なロボットがひらく、弱いという希望、できないという可能性」、なかなかいいなぁと。そこで、今日のテーマのひとつとして、この「ひとりでできる」あるいは「ひとりでできないもん」という話を取り上げてみたいと思っています。
「ひとりでできるもん!」ですよね、普通は。「ひとりでできないもん」じゃなくて、「ひとりでできるもん!」なんですけど、こういうことを善しと考えるのは、何か社会文化的な背景があるのかなと思っています。例えば小さな子どもを育てるときって、手のかかる子どもを目の前にして、「はやく一人でできるようになればいいのになぁ」ということで、「はやく一人でできるようになるんだよ」と声をかけながら、子どもを育てていくという側面があるのかもしれません。その一方で、子どもたちは「もう自分で一人で靴下履けるようになったんだよ、えらいでしょ」「もうひとりでできるもん」と得意がっていたりする。こういう感覚というのは「個体能力主義」というふうに呼ばれているものです。それから、ぼくは20年くらい企業の研究所で働いていて、その後に大学に戻ってきたときに驚いたのは、「まだ定期試験というものがあって、その試験というのは一人で受けるものであって、誰の力も借りてはいけません!」という文化が当然のように残っていた。「知らないことは知っている人に聞く!」という文化から、一挙に「誰の力も借りてはいけない」という文化に引き戻されてしまった。で、試験問題を作りながらも「こういうモノサシで人を評価しちゃっていいの?」ということを考えていました。あるいは、自律的なロボットの研究ということも、実は誰の助けも借りずに、一人で動き回れるということを善しとしていて、そういう価値観の下で技術開発をしているという側面があります。ですから、これも個体能力主義の影響を暗に受けているのかなというふうに思っています。
「自立とは依存先を分散させることなんだ」
このレクチャーシリーズの中でもいろいろ議論されてきたとうかがっているんですけども、「自立する」というのは「誰の力も借りずに、一人でできること」というような意味で捉えられていて、この「自立」という語の反対語は、「依存する」ということなわけです。これが一般的になっているかなと思います。最近こういう考え方を見直すような議論も出てきているんですけど、その論客の一人に熊谷晋一郎さんがおられまして、彼は医学部を卒業されて小児科医なんですけど、最近は東大先端研の先生をされています。『弱いロボット』という本と同じく、医学書院の「ケアをひらく」というシリーズの中の『リハビリの夜』という本を書いて、よく知られている人なんですけど、彼は脳性まひの後遺症が残っているのだそうで、日常的に車いすでの移動が必要だということですね。先の震災のときにはとても怖い思いをしたということを聞きました。ビルの上階で車いすに座っていて、それで大きな地震で電気が消えて、人もみんな逃げ惑うという状況だったわけですね。彼は電気が付かない、エレベーターが動いていないという状況の中でどう避難しようか、という話ですよね。階段も使えないし、人の手もなかなか借りられない、という状況に置かれたそうなんですけども、そんなときに彼が思ったことはですね、普通の、健常の人というのは、「一人で避難している」というふうに思われがちなんですけど、実はその依存先は多様であって、分散してあるんだと。だから電気が付かないとき、あるいはエレベーターが使えないときには階段を使おうとするだろうし、電気がなくて暗いときには手探りをしながら階段を駆け下りるということができる。ところが障がいのある方というのは、その依存先が限定されている。その意味で、依存先が限定されてしまった人たちが障がい者なんじゃないかというわけです。こういう気づきもあって、彼が言っていたのは、「自立するというのは、むしろその依存先を増やすことなんだ、依存先を分散させることなんだ」というわけです。これを聞いたときに、ロボットの自律性を議論するときにも、すごく示唆的な考え方だなぁと思ったわけですね。
「個体能力主義」というのはどういうところから生まれてきたのかなということをいろいろ考えてみると、アリの足跡の話が当てはまるのかなと。みなさんもどこかで聞いたことがあるかもしれません。砂浜の上を一匹のアリが歩いていて、その様子をあらためて見てみたら、その砂浜に残されたアリの足跡がとても複雑だった、という話です。どうしてこのような複雑な足跡をアリというのは残すんだろうと。いろんな議論があるんですけども、アリというシンプルな生物であっても、これだけの足が付いていて、それを試行錯誤しながら歩いているんだから、こんな複雑な足跡を残すのも当たり前だろう、という考え方をする人もいるだろうし、あるいはアリにとっては、砂浜が熱くてですね、ふらふらになって、どこへ行こうかというふうに迷いながら歩いているんじゃないか、という考え方をする人もいるわけですね。そういう意味で、ぼくらは複雑な足跡を残した原因をアリの個体に一方的に帰属させやすいのかなぁと。これは「帰属傾向がある」というふうに言われているんですけども、こういったことを別の視点で考えたらどうなんだということで、ヒルベルト・サイモンという人が1969年に書いた『システムの科学』という本の中で述べていたのは、「このアリの行動の軌跡の複雑さというのは、必ずしもアリの内部の複雑さを反映したものではないのではないか。むしろその多くは環境の複雑さを反映したものなんだ」と。言われてみれば当たり前なんですけども、小さなアリにとって、砂浜の起伏というのは、目の前の小高い丘のようなものなのかもしれません。そういうものを避けながら歩いていったら結果としてこういう複雑な足跡が残ったんじゃないか。それは、こういう複雑さの原因を砂浜というアリにとっての環境の複雑さに帰属させるという考え方なんですけど、環境側に一方的に帰属させるのも何となく無理があるし、あるいはアリの内部構造に一方的に帰属させるのもまあ無理がありそうだ。むしろ「複雑さを生み出した能力」というふうに捉えるのであれば、その能力というのは、アリの周囲の環境と、アリの個体内部の構造との両方に分かち持たれているものなのではないか。そんな議論が出てきたわけですね。同じように、ぼくら人の振る舞いというのは、すごくかしこくて複雑でよく作られているというふうに考えられがちなんですけど、実は半分は環境の複雑さをうまく生かしながら複雑な行動を作っている。我々は過剰に複雑な内部構造を想定しやすいんじゃないか、というのがヒルベルト・サイモンの指摘だったわけです。
帰属錯誤(attribution error)という問題
すこしまとめますと、我々の身体というのは外から容易に観察できるので、その身体というのは個として完結しているような感覚を持たれやすい。この内部にいろいろな機能を一方的に帰属させやすい。能力ということを考えたときも、あるいは機能ということを考えたときも、反対に、障がいということを考えたときもですね、個体に一方的に帰属させて考えやすいということなんだと思うんです。これは一種の帰属錯誤(attribution error)とも言えるかもしれません。こういう「アトリビューション・エラー」というのは日頃いろんなところで起こっていて、例えば同じような図式なんですけれど、最近の子どもたちは、(画像:東京の地下鉄の路線図)こういう複雑な地下鉄を乗り継いで小学校に通う。すると地方に離れて住んでるおばあちゃんが孫の様子を伝え聞いて、「最近の子どもたちはとても賢いもんだね。こんな複雑な地下鉄を乗り継いで学校に通うんだから」と言う。ところが子どもたちの視点から見るとどういうふうなのかと言えば、実は「おばあちゃんね、そんなに難しくないんだよ。バス停に行ったらいつものようにバスが来てね、そのバスに乗ったら、駅まで連れてってくれたの。駅に着いて歩いていたら、いつもの看板が見えてきて、その方向に歩いていったら、人がみんな同じところに歩いていくのでね、そっちに行ったんだよ」とか、あるいは「もう少し行ったら乗り継ぎの案内が見えてきたので、そこに行ったらホームにたどり着いただけなんだよ。それで友達とおしゃべりしてたら、いつの間にか学校にたどり着いただけなんだよ」という言い方ができるかもしれませんね。そういう意味では、ここでも帰属錯誤が起こっていて、おばあちゃんから見たらこんな地下鉄の路線図を頭の中に入れて、最適な行動を生み出しているんだから、最近の子どもたちは賢いもんだねという見方をする、これは鳥瞰的な視点ですよね。ところが子どもたちから見れば、その行為者の内なる視点から見ると、もうちょっと別の見方ができる。ぼくらも東京駅を歩いていて、特に駅の中の複雑な地図を頭に入れているわけではない。ときどき駅構内の地図なんかをあらためて見ると、「ああ、ここに八重洲口があったんだね」とか「ここが新幹線の乗り換えのところだったんだ」と意外に思う。ということは、実はそういうものが頭に無くても行動できていたというわけなんです。何が言いたいかと言うと、われわれの行為というのは、そういう状況の中に埋め込まれているんだ、状況と一緒になってかしこい行動を作っているんだ、という状況論的認知の話になるわけですけど、我々を取り囲んでいる人の流れであるとか、看板であるとか、壁、あるいは地面なんかをリソースとしながら、一緒に合目的な行為を組織化していただけなんだよ、という話なんです。われわれは「自分たちが街の中を歩いているんだ」と、行為主体として考えがちなんですけども、同時に「その街が私たちを歩かせていた」という言い方もできる。そういう意味で、子どもたちの知性というのは、子どもの個体内部にあるのではなくて、むしろ「子どもたちとそれを取り囲む環境という関係的なシステム全体が知性になっている」という言い方ができるんじゃないかというわけですね。
そもそもなぜわれわれは頭の中にいろいろな知識を入れずに、むしろ行き当たりばったりな行動を取っているのか、という話もいろいろな議論が出てくると思うんですけど、実は障がい者じゃなくても、われわれそのものも、われわれの身体というのも不完結なものなんじゃないか、という見方をしたらどうだろうと思うのです。(画像:マッハの左目で描いた自画像)それの手がかりになっているのがこの「マッハの絵」なんですけど、みなさんもどこかで目にしたことがあるかもしれません。マッハが左目から見た自画像を描こうという、この発想がすごいと思うんですけど、自分の自画像を自分で描くというわけですよね。左目だけ開いて、そこで何が描けるかということで描いているわけですけど、最初に床が見えますよね。それからその向こうの壁が見えたり、書棚が見えたり。もうちょっと目を近くに持ってくると自分の足が見えて、手が見えるというような状況で、目線をもっと自分の手元に持ってくると、自分のスーツの襟が見えたりする。左目から見ているので、これが鼻で自分の口ひげ、というわけですね。やっぱり面白いのは、自分の内なる視点から見ると、当たり前なんだけど、自分の顔は見えない、というわけです。という意味で、ぼくらは日常生活の中で自分の顔を見ることなく人と接していて、たぶんぼくの顔はこんなところに付いていてこんな表情をしているんだろうなということを考えながら生活しているんですね。
そういう意味で、鷲田清一先生がある本の中で仰っていたのは、わたしたちはイメージの中にある顔をここにくっつけて生活している。それで、特に困ることがない、というのが面白い。どうしてかというと、ぼくがこういう空間の中で例えば顔を左右に、あるいは上下に動かしてみる、そういう動きの中で、今自分が何をしようとしているのか、どんな存在なのかということが浮かび上がってくるわけです。それをウルリック・ナイサーは「生態学的自己」の獲得と呼んでいるんですけど、自分の動きに合わせた外界の見えの変化の中で、今自分がどういうことをしているかという、自己を特定しながら生活しているというわけです。自分の内なる視点から見ると、われわれの身体というのはある意味で不完結であって、それを補うために、一旦は自分の行為の意味を環境にゆだねて、環境から教えてもらいながら、行為を形作っている。そういうふうに、環境と一つのシステムを作りながら我々は生活しているんだという話なんですよね。これは環境との関係だけじゃなくて、ここでこうやって話しているときに、みなさんがどんな表情をしているかによって、今ぼくの表情がどんなふうに見えているのかがイメージできる。これは先ほどの「生態学的自己(ecological self)」に対して「対人的自己(social self)」と呼ばれるんですけど、皆さんの顔を見ながらぼくが今どんな状態、どんな顔つきで話しているのかを特定しながら話している。まあ、イメージに過ぎないんですけど、そういうイメージをくっつけてみんなと接しているということが言えるかもしれません。そういう意味で、我々の身体というのはむしろ不完結なのではないか。不完結であるがゆえ、環境にゆだねながら、環境と一つのシステムを作りながら、行為を形作っているんだという話になるわけですね。
不完結なわれわれの身体
これは元を辿ればジェームズ・ギブソンのアイデアになるわけですが、「我々の身体は不完結である」ということを前提に、自分を取り囲むものと一つのシステムを作りながら、結果として面白いこと、あるいは価値ある行為を生み出しているんではないか、というわけです。我々の身体の不完結さ、この不完結な部分を環境にゆだねながら環境のほうから補ってもらって、一つのシステムを作りながら行動を形作っているんだという話です。ぼくの『弱いロボット』という本でいう「弱さ」というのは、実は我々の身体の不完結さというところから来ている「弱さ」であるというふうに思っているんですけど、そういうふうに、周囲の環境にゆだねつつ一緒になって行為を形作るようなロボットのことを「弱いロボット」と呼んでいるわけです。
こういう考え方はいろいろなところに当てはまるんじゃないかと思います。例えば「歩く」ということの面白さを我々に教えてくれたのがASIMOなどの「動歩行」のモードなんです。今まで「歩く」ということをどういうふうに考えてきたかというと、薄氷の上を踏むように慎重に自分の重心を確立させてから、またその重心を前のほうにそっと少しずつ移しながら、そこで重心バランスが確保されたのを確認して、また少しずつ進めるという、おそるおそるの歩き方をしていたわけですね。こういう歩き方のことを「静歩行」と言うんですけども、ASIMOなどの「動歩行」でやった歩き方のモードというのは、ほんのちょっと倒れ掛かるようにして思わず何気ない一歩が前に出てしまう。どうなってしまうか分からないんだけど、とりあえず一歩を地面にゆだねてみる。すると地面はそれを上手に支えてくれて、我々の期待を裏切ることなく、きちんと支えながら、地面からの効力でバランスを回復させて、もう一歩バランスを崩しながら一歩進める、ということをやっているわけですよね。そういう意味では、我々は普段、「地面の上を歩いているのはこの私だ」というふうに考えがちなんですけど、この動歩行の場合は、「我々は地面の上を歩くと同時に、その地面が我々を歩かせている」ともいえると思うんです。ですから、ここでも環境と一つのシステムを作りながら、歩行という行為を形作っているんだ、というような言い方ができるかもしれません。身の回りのことをいろいろ考えてみると、そんなことが結構多いなと。あるいは、そろそろみなさんも退屈になってきて落書きを始めるとか、いろんなことをされているかもしれませんけど、「ぼくは昔から字を書くのがうまかったんだよな」とか、あるいは芸術系の学生さんなので「絵を描くのは上手なんだよ」と思われているかもしれないんだけど、実は上手に絵を描かせているのは、個人の能力だけではなく、むしろ紙と鉛筆のあいだにある摩擦がみなさんに上手な絵を描かせているかもしれないんですよね。だからちょっとしたザラザラ感のある紙のほうが上手なタッチが生まれるとか、そういう周囲の環境と一緒になって行為を形作っているというのは、落書きのときや絵を描くのでも出てくるのかもしれません。「アナログに描いているときはとても上手に描けたものが、何かパソコンを前にしてマウスやペンタブで絵を描こうとすると全然駄目なんだよなぁ」と言われる方もいるかもしれませんね。
他にも同じような議論がいろいろあるんですけど、社会的な相互行為という場面でも実は同じようなことが当てはまる。例えば、ぼくが今ここで話している。「一方的に喋っているだけじゃないか、お前は」と言われるかもしれないんですけど、ぼくが今ここで「話し手」であるのは、みなさんの何人かの方がちゃんと「聞き手」になってくれているから、ここであわよくば「話し手」になれている。そういう会話の中での役割も、相互行為の中で組織化されるということがよく言われています。そういう意味で、わたしたちが「話す」ということも不完結な身体がやっていて、それをみなさんに一部ゆだねながら、そしてみなさんがそれを支える中で、会話というものを作り上げているということが言われているわけですよね。これは社会的相互行為論などで言われている議論なんですけど、発達心理学などの領域でも全く同じで、一人では何もできないような子どもたちも、養育者の支えを上手に引き出しながら、結果としてミルクを手に入れたり、行きたいところに移動できてしまう。これはすごいな、と思うわけです。子どもがお母さんの胸の中にだっこされて、一人では何もできないという状況の中でも、ちょっとぐずりながら、結果として必要なミルクを手に入れてしまう。あるいは行きたいところにも移動できてしまう、という能力はすごいなと。自分の身体の不完結さということを押さえつつも、周囲の支えを得て、一つのシステムを作りながら行為を形作ってしまうというのは、なかなかかしこいのではないかというわけです。
ロボット屋さんが一生懸命に「ひとりでできる」ということを議論している中で、彼らは何も考えず飄々としているというのは面白いですよね。「ひとりでできる、ってそんなにすごいことなの?」というようなことをいかにも言わんとしているような表情ですね、のほほんとしているのがなかなかいいなと。我々そのものは常に我々を取り囲むものと、その支えを受けながら行為を、言葉を形作っている、発達を支えてもらっている、ということであれば、最初からそういう設計の下でロボットを作ったらどうだろうということで、「弱いロボット」あるいは「関係論的なロボット」と呼んでいるものを作ってきたわけです。ですから、自己完結するものを目指すのではなくて、「ひとりでできないもん」っていうような状況の中で、周囲からの支えを予定しながら、そこに半ばゆだねながら一緒に意味のある行為を組織化していくようなものが作れないかなということなんです。手本になっているのは、我々の不完結な身体ということです。それを編集者の白石さんは「弱いロボット」というふうにネーミングしてくれたということなんですね。その一つが先ほどの〈ゴミ箱型のロボット〉で、自分では何もできないんだけど、他者の支えを予定しながら、その支えの中で一緒になってゴミを拾い集めるという行為を形作る。そういう関係性に発展してきたわけです。
引き算の戦略としての「チープデザイン」
どういう設計思想なのかというと、例えば「ゴミを拾うことができないんだったら、近くにいる子どもたちに手伝ってもらえばいいんじゃないか」ということですよね。あるいは、十分な画像処理技術がなくて、どうやってゴミを分別するのか、といったときに、「ゴミの分別ができないんだったら、周りの子どもたちに分別してもらえばいいんじゃないの」という発想です。そうすると、必要に応じて機能をどんどん追加するというよりはむしろ、どんどん機能を削ぎ落とすことができるんじゃないか、というわけです。個体が持っている機能をどんどん削ぎ落とす中で、周囲との関係から立ち現れる機能をもっとうまく利用しようじゃないかと。こういうデザイン手法を「チープデザイン」と呼んでいいか分からないんですけど、生態系の中で生き延びている生物の持っている一つの戦略として、こういう側面があるんじゃないか。自分の中でどんどん機能を加えていくというよりは、「ひとりでできないもん」というあきらめの中で、周囲との関わりをうまく利用して、結果としてかしこいことをしてしまう、こういう戦略があるんじゃないかと思うわけですね。
ロボットのデザインということを考えたときに、これは「引き算としてのデザイン」になるんじゃないか、というふうに思ってきたわけです。チープデザインの優れた例、隠れた例として、最近お掃除ロボットが面白いと思っているんですけど、お掃除ロボットとしばらく同居してみると、みなさんの中にも体験した人がいると思うんですけど、一人で勝手に掃除をしていると思いきや、いろんなところでつまづいたりしているんですよね。例えば弱点の一つがこの床の乱雑なケーブル。このケーブルのところに乗り上げて立ち往生してしまうということがよくあります。それから、椅子が乱雑に並んでいると椅子と椅子のあいだに入り込んで袋小路になって、なかなか外に出られないということがあるんですよね。だんだんお掃除ロボットとの同居が長くなるとどうなるかというと、スイッチを押す前にぼくらがケーブルをきれいに直す。ちょっとどかしてあげるとか、あるいは椅子をまっすぐに並べ始めるなんていうことを無意識にやっているんですけど、それでよくよく考えてみると、結果として部屋はとてもきれいになっていた。その部屋をきれいに片付けたのは誰かというと、ぼくが一人でやったわけではないんですよね。あるいはお掃除ロボットが一人でやったわけではなくて、実は一緒になって部屋を片付けたというわけなんですね。そういう意味で、お掃除ロボットというのはわれわれを味方にしながらお掃除していたという意味では、本当に「かしこいな、何かスマートだな」というふうに思うわけです。われわれを味方にしているというだけではなくて、彼らは別のところも味方にしているんです。お掃除ロボットというのは、まっすぐ歩いていって、壁にゴツンとぶつかると、そこで進路を変更して別のところにまっすぐ歩いていく。そしてまた壁にぶつかって進路を変えて、というそんな動きをしているんですね。ですから部屋をまんべんなくお掃除しているということは、実は壁を味方にしながら掃除していたというふうにも言えるかもしれません。あるいは、お掃除ロボットが一生懸命にお掃除しているときに、ソファーの椅子であるとか、テーブルの椅子などが邪魔になるかなと思うんですけど、実はこの凸凹したところがランダムな動きを生み出しているということで言えば、お掃除ロボットがまんべんなくお掃除をするという役割を、こういうところを味方に付けながら機能を生み出していたというふうに言えるかもしれないんですね。
そういう関係性を考えるとなかなか面白いわけです。ロボットのデザインということを考えたときに、ひとつはどんどん機能を増やしていくという考え方もあるだろうし、その一方でむしろ機能を減らしていくという考え方もある。これまでのロボット作りの多くというのは、とりあえず二足歩行させようじゃないかと、二足歩行ができました。今度は手振りも必要だということで手をつけました、顔の表情も必要だということで顔や目の動きをつけました、ということで、必要に応じてどんどんどんどん機能を「追加していく」という考え方なんですよね。これを「足し算としてのデザイン」というふうに言えるかもしれません。もう一つは、人間に近づけようとしてどうしているかと言うと、目の前にそういうモデルがあるんだから、それに近づければいいんじゃないかということで、表情をまねたり、表情筋の動きを作り上げたりということで、実体として同型な人らしさを追求しようとしてきたというのが、ヒューマノイドやアンドロイド、ジェミノイドなどの研究の一つの特徴かなというふうに思います。
こういうふうに個体の中にどんどん機能を追加するという考え方が、先ほど「帰属エラーを起こしていた」と言いましたが、これが個体能力主義というわけですね。われわれは機能や能力を個体に一方的に帰属させやすい。だから、必要な機能があれば、どんどん個体に追加していけばいいんだ、という考え方が一般的なんじゃないかというふうに思います。ロボットに限らず、家電の量販店などに行くと、毎年新たな製品が出てきて、同じ価格だったら、ぼくら購買する側は機能が多いほうを思わず選んでしまうということがあると思うんですよね。そういう意味では、技術者も毎年新たな機能を追加しないといけないという切迫感があってどんどん機能が増える傾向にあります。これをドナルド・ノーマンがなかば揶揄しながら『誰のためのデザイン?』という本の中で言っていたのが「なしくずしの機能追加主義」ということですね。どんどん機能を追加してしまう。これはエンジニアの悪い癖なんじゃないかということで、「なぜ機能を追加してしまうのか」と聞いてみると、「だってそれが仕事なんだから…」というわけですよね。機能を追加しないことには自分の仕事が無くなってしまうので、毎年少しずつ増やすんだと。それにも限界があって、最近はすこし疲弊感が出てきていると思うんですよね。
例えばお掃除ロボットを日本に技術として持ってくると、日本のメーカーはどうするかというと、音声認識や音声合成機能などの余計なモノを付けようとする。ちゃんと会話できるとか、あるいは「SLAM」というアルゴリズムなんですけど、環境をきちんと把握して、環境の中で自分が今どこにいるかということを同時に把握するようなアルゴリズムを追加する。それを付けると今度は部屋を計画的に効率よく掃除できる、そういう新しい機能を付けましたよ!というふうにちょっと余計なことをしてしまうんです。どんどん機能の追加を競って量販店に並べるということを繰り返している。日本のものづくりにはなにか疲弊感のようなものを感じるんですけれど、そういうところに一つの原因があるのかな、というわけです。AppleにしてもGoogleにしても、パラダイムシフトをどんどん自分たちで生みだしていて、必ずしも新しい機能を追加することに価値を置いているわけではないと思うんですけれど、かたや日本の企業の多くはパラダイムシフトを求めるのではなく、「なしくずしの機能追加主義」にまだとらわれているかなという感じがあるんです。われわれの身体でさえも不完結で、ひとりでできないということがある。で、「ひとりでできないもん」ということならば、「ここはチープデザインでいいんじゃないか」というわけです。
「個体」の機能を追求するというよりは、「関わり」の中から立ち現れるような機能とか価値を追求してもいいんじゃないか。便利なものを指向するというよりは、むしろ「コト」を生み出すような関係性を指向するものづくりでいいんじゃないか。この辺りはみなさんが専門にされていて、日頃のアート活動、芸術活動の中でも体感されていることかもしれません。ただ、技術者の視点から見るとまだこういう便利なものを善しとしている風潮があるということですね。ぼくたちがやろうとしているのは、こういう「関係を生み出す余地をデザインする」とか、「引き算としてのデザインをする」ということをしていて、その中で、ロボットというのはどういう立場にあるかと言うと、ロボットというのは「コト」であるとか、関係を生み出すためのデバイスとしてすごく面白いものなんですよね。実は「コト」とか関係を生み出すデバイスの手本というのはわれわれの身体なんですね。思わずゴミを拾ってあげてしまう、わたしたちの身体が揺り動かされてしまうんですけど、そういうコトを生み出すということは身体と身体のあいだでやっていることなのではないか。そういうコトを生み出すロボットを作ろうということで、「弱いロボット」につながってきたというわけです。
非分節音のもつ可能性、グラウンディング(意味付け)の連鎖
(映像:〈トーキング・アイ〉)ここからは、いくつかランダムにわれわれが手がけてきたロボットを紹介してみたいと思います。技術屋さんとして作ってきたので、みなさんのようなアート系の人から見るとちょっと情けないようなのが結構多いかもしれません。ロボットを作りはじめるきっかけになったのは何かと言うと、20年前に作った〈トーキング・アイ〉というオンスクリーンのエージェントです。雑談というものを作り出せないかな、ということで、1995年当時は人工生命の創発現象などがすごく流行っていた時代でしたね。あるいはマルチエージェントの創発現象とかですね。そういう創発現象のひとつとして、人の雑談というものを生み出せないか、ということを懸命に考えていて、ATRに異動した年の秋に、このおしゃべりする目玉〈トーキング・アイ〉というのを作りました。これは当時のシリコングラフィクスのコンピュータですけど、こういうものを二つ合わせて、はじめは二つのコンピュータがおしゃべりするようにした。雑談を作ろうというふうに考えると、雑談を構成している発話ってどういうものなのかということを考えちゃうんですよね。発話が持っているいろんな機能とか役割ということを考えると、だんだん雑談じゃなくなっていくというジレンマを抱えていて、「雑談ってどう作るの?」「雑談ってどう作られているの?」といういろんな議論をする中で、むしろ意味の無い言葉とか、意味の不完結な言葉、というのがすごく重要になってきて、その言葉を相手に投げつけると相手が何らかのかたちで応答してくれる。
そうするとそこに、当事者にとってのオリジナルな意味が立ち現れるというようなことなんですね。雑談というのはやり取りすることそのものを楽しみながら、当事者にとってのオリジナルな意味を生み出して、そこでのオリジナルな関係を探るものなんだということが何となく分かってきて、そこでむしろ一個一個の言葉の意味を不完結にする、あるいは不定にするという作業を始めたわけですよね。そういう中で、個体としての機能ではなくて、関わりから立ち現れるオリジナルな意味というところへ着眼点が移ってきた。そのきっかけになったのがこの20年前の〈トーキング・アイ〉なのかなというふうに思っています。今も同じようなものをみんなで作っているんですけど、これはドライビングエージェントの中で、こういう多人数会話をさせようということで、作っているものです。目玉のエージェントがですね、ダッシュボードのところで仲良くおしゃべりをしている、おしゃべりしながら「そこ右行ったらいいんじゃないの?」「いや、そこは左だよ」というふうにわいわいしながら、そういうものを〈トーキング・アイ〉と同じ原理で作ろうとしているところです。
(映像:非分節音で反響模倣する〈トーキング・アイ〉)言葉の意味をどんどん削ぎ落としていくとどうなっていくかということを追求する中で見出したのがピングーというクレイアートのアニメーションでした。ここで「ビービー」「ビビー」とやり取りしている音声は「非分節音」と呼ぶんですけど、非分節音とはまだ分節化されていない音のことですね。言語としての意味がまだ分節化されていない。これは個体としての意味を削ぎ落とした良い例なんですよね。非分節音と非分節音をインタラクションさせると何か面白い意味が出てくるんじゃないか。最近学生たちと話しているのは、「この非分節音というのはコミュニケーション研究におけるiPS細胞なんじゃないか」と思っていて、いろんな意味に分化していくという意味で面白い。非分節音で反響模倣する〈トーキング・アイ〉というのは1998年ぐらいに行っていた仕事なんですが、原理的にはとっても簡単です。要するに、わたしたちが話しかけたときの音声を、この〈トーキング・アイ〉は非分節音に変換して、それを反響的に模倣するというだけなんですけど、でも人がこれに関わっているときは、そういうことはぜんぜん知らないので、何か一生懸命にこちらに応えてくれているようにぼくらが勝手に解釈して、それでやり取りが進んでしまう、というか、会話の組織化が起こるというのは面白いというわけですね。これをロボットにしたらどうなんだろうということで、〈む~〉というクリーチャが生まれてきました。
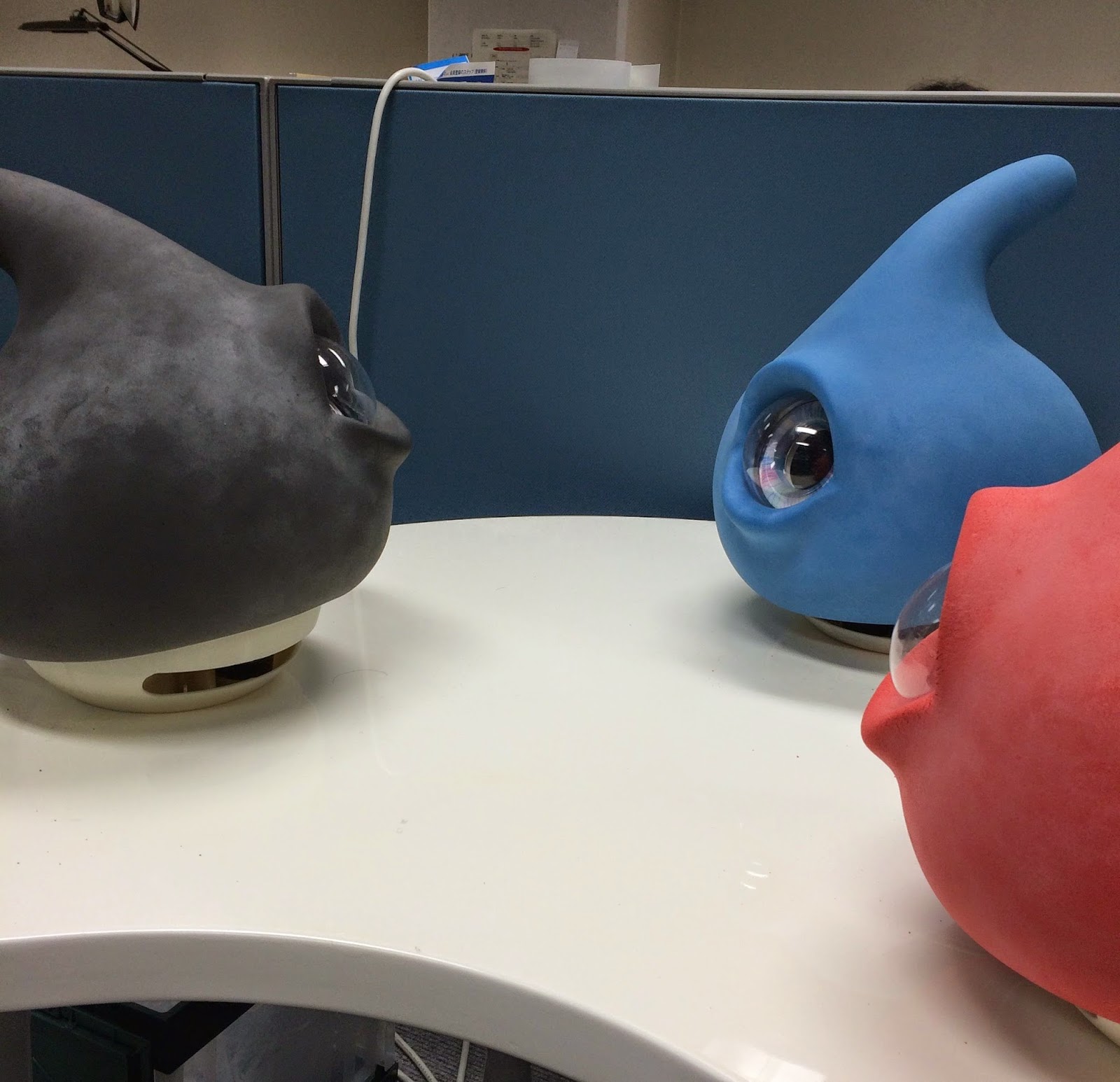
(映像:〈む~〉とのインタラクション)SIGGRAPH2000でこれを展示したときに思ったのは、これ〈む~〉の一つひとつでは能面のようにほとんど表情がないんですが、互いにインタラクションさせてみると、一方のAの動きに対してもう一方のBが随伴的に動くということで、Aの意味をBが意味付けてあげる、あるいはBの行為を先行するAの動きが意味付ける。相互に意味付け合って、表情さえも生まれてくるということが面白いなぁと。これも「弱いロボット」のコンセプトのスタートラインにあることなんですけど、一個一個の意味というのが不定で不完結なんだけど、こういうふうにお互いにグラウンド(意味付け)し合う中で、オリジナルな意味を作るという意味では面白い。これは母親と子どもがやっている喃語のやり取りなんかも似たようなことかもしれないなと。海外などで展示したことがある人は分かると思うんですけど、向こうの方の反応がすごく良くて、ほとんど演技してくれるので助かります。これが丁度、子どもが喃語という「うんぐーうぐー」というような言葉を発しているときに、お母さんが一生懸命語りかけて、そうすると子どもが随伴的に反応してくれる。最初はこの子は何なんだろうと思って関わるんだけど、次第にこの子には心があるんじゃないかという思いで関わってみるんですよね。そうすると、それに対して、また「うんぐー」と答えてくれるんで、「ああ、やっぱりこの子には心があるんだ」というふうに自分の仮説を強化して、もう一回語りかける。これを「環境フレーミング」というふうに呼ぶわけですけど、そうやってやり取りがだんだん立ち上がってきて、言葉の意味であるとか、やり取りのスキルが立ち現れてくるんじゃないかという話を2000年くらいにスタートさせました。これも「引き算としてのデザイン」、表情を無くすとか、言葉としての意味を引き算していって、そこから出てくるオリジナルな意味を追求しようという発想です。
パソコンのようなロボット、ロボットのようなパソコン
(映像:〈トウフのようなロボット〉)この〈トウフのようなロボット〉はATRからいまの大学に移ってから学生たちが作ってくれたんですけど、もっと引き算していくとどうなんだろうと考えると「豆腐かな」というわけですね。よたよた、ぷるぷるするだけのロボットが作れたらいいなというわけで作ってみたものです。当時は「パソコンの筐体が柔らかいものだったらどうなんだろう」ということで、「パソコンのようなロボット、あるいはロボットのようなパソコン」ということを考えて作ってたんですね。まあ、こういうもので、普通パソコンの電源スイッチをどうやって入れるかというと、パソコンの後ろに手を回してスイッチを入れるんですけど、このパソコンの場合には、頭を叩くんですよね。そうすると、眠っていたパソコンがむくむくと起きだしてスイッチが入る。そういうふうに引き算していったらどうなんだろうと。そうすると、誰もこちらが顔でこちらが背中だというふうに見えないんだけれど、その関わりの中で、どう見たってこっちが顔で、ここに目があって、とぼくらが勝手にそこに意味付けしながら関係性を作り上げるというようなことができるということが分かってきました。
群れるロボットと関係性の変化
(映像:〈ゴミ箱ロボット〉の群れ )じゃ、今度は「機能を引き算するとどうなの?」ということで、ようやく〈ゴミ箱ロボット〉につながってきた。これは、自分一人ではなにもできない「弱いロボット」の典型のようなものなんです。一人ではゴミを拾えないんだけど、子どもたちのアシストを上手に引き出しながら、結果としてゴミを拾い集めてしまうというロボットになっていったわけですよね。この映像にあるものは2009年に作ったものなので、いまでは劣化が激しいんですけども、まだいろんなところで活躍してくれています。これを3つで動かしているとですね、子どもたちが勝手にゴミを分別してくれるということは結構面白かったですね。「こっちはペットボトル用、こっちはアイスクリームの棒だよ」と言いながら、みんなで分別してくれているというのはなかなか面白い。ロボットと子どもたちのあいだでそういった役割取得が行われるというのは面白いなと。あるいは、公共の広場で〈ゴミ箱ロボット〉一つで動かした場合と3つで群れを作って動かした場合ではどうなるのかという実験をやってみました。結論から言うと、単独で動かすと遠慮なく子どもたちがいたぶるというか、蹴飛ばしたり、いじる感じがあるんですよね。遠慮なく人が集まってきて、という。一方で〈ゴミ箱ロボット〉が3つで群れをなしている場合は、ちょっとみんな遠慮しながら遠巻きに眺めるとか、そういう雰囲気が生まれてきます。群れで動いていると、なかなかこの場の中に近づけないという、ある種の社会的なプレッシャーを感じるようなんですね。〈ゴミ箱ロボット〉の周りに、どんな人がどれくらいの場所で関わっているのかを、後からクラスター分析を利用して調べてみると、ちゃんとエドワード・ホールがいっていた、公衆距離と、社会距離と、個体距離と、密接距離にその分布がきれいに出てくるということも分かってきました。
関係論的なロボット、関わりの中で生まれる表情
(映像:背骨をモチーフとしたロボット〈アイ・ボーンズ〉)いま私のところの学生さんがいろんなロボットを作っています。これ〈アイ・ボーンズ〉もちょっと不気味な、というか、なにか訳の分からないロボットで、何をしようとしているのか分からない。下はルンバのような、iRobot社が研究用に作っているものをベースにしています。これは博物館なんかで、一緒に展示を案内してくれるようなロボットをイメージして作られていて、博物館には恐竜のいろんなものが置いてあって、骨というイメージがあるらしくて、それで、学生さんが背骨をモチーフにして作ってくれました。実はこの不気味さとか訳の分からなさというのが、子どもたちにとっては人気の的というか、新奇性の力なんだと思いますが「なんだコイツは?」という感じで集まってきてくれて、ここで輪を作ってくれるわけですね。ここに集まってきてロボットと関わっているときの子どもたちの表情ってどんなもんなんだろう、ということを今いろいろ探っているんですけど、普通、子どもの表情は、お母さんがカメラを構えたときとお父さんがカメラを構えたときとでは違うと思うんですよね。じゃ、ロボットと関わっているときの子どもたちの表情ってどうなんだろうと。これも関係論的なセンスになんですけど、そういうことを観察できないか、というわけです。子どもたちがどう関わっているのかというのは、対人的な自己の獲得に関わっている話で、結構面白いんですけど、時々どきっとするような写真が撮れることがあります。ぼくらがカメラを構えたときにはなかなか見せてくれないような表情をロボットには見せてくれるんで、なかなかオリジナルな表情が生まれてきて面白い。これは「写真を写してあげる、写してもらう」という二項関係ではないんですよね。むしろ関わりの中で一緒に表情が作り上げられるという意味ではこれも関係論的なものかな、というふうに思っているわけです。
(映像:ヨタヨタと動き回る〈ペラット〉)それから、おぼつかない「弱いロボット」ということで言うと、これは〈ペラット〉って言うんですけど、例えば子どもが一歳ぐらいではじめて歩き始めるときって、よたよたしていて、何か危なっかしい。親たちは必死になってその後を追いかけたり、ちょっと転びそうになると無意識に手を差し伸べてしまうわけですけど、そういう思わず手を出してしまうような「場」が生まれるのは面白いなというふうに思っていて、そういう「場」を生み出すような、ヨタヨタと動き回るロボットを作れないかと考えています。この〈ペラット〉はスケルトンになっていて、重心がこのホイールの上にあるので常に制御してないと倒れてしまう、いわゆる倒立振子型のロボットですね。たとえば自分の机で仕事していると、傍でふらふらふらふらと近寄ってくるんですね。人がいないと所在なく動いているんですけど、人がいると近寄ってきて、そこで立ち止まってホッとした表情でいる、というものです。何も役に立たちそうもないんだけど、そのロボットを修理すると言って学生が持っていってしまうと、そこで何か喪失感を覚えてしまう。そういう意味では、「何も役に立たないんだけど、いないとなんだか寂しい」、そういう存在感を作りだせるのは大したもんだと思っているんですね。ぼくらはこのロボットをあまり意識していなかったんだけど何となく支えてあげているような感じがあって、でもその結果として、われわれはその存在に支えられていた、というふうに、支えつつ支えられる関係をこういう何気ないロボットで作り上げていたのかなと。こういうことを考察しながら論文を書くという、まあ、そんな仕事をしています。
協調を引き出すロボット
(映像:〈Column〉 )この〈コラム〉というロボットも学生さんの生み出したものです。12のアクチュエータから構成されていて、そのサッカーボールのような身体を変形させながら、わずかに重心を偏らせながら前の方向に転がっていくというロボットです。本当はロボット自身で内部のアクチュエータを協調させながら動き始めてくれればいいんですけど、はじめからなかなかそこまでうまくいかないので、今は複数の人が外から操作するようなモードで動かしています。三人の人がX軸方向とY軸方向とZ軸方向をバラバラに操作して動かしてあげるというものですね。ただそれぞれの人がバラバラに動かしただけでは、ロボットは思った方向に動いてくれません。そうすると、とてももどかしい気持ちがわき上がって、いつの間にか隣にいる人と目線を合わせながらタイミングをはかって、目標の方向に転ばそうとする。そのもどかしさがみんなの応援とか協調を引き出してしまうということがなかなか面白いんです。こんな実験をいろいろやっていまして、初心者の人と熟練の人ではどういう協調のパターンの違いがあるかということや、初心者だった人がどうやったら熟練していくのかということをデータ解析して論文を書くという仕事ですね。それと人同士の協調のコツをだんだんにロボット自身が覚えていくと、自分で自由に動き回れるようになれないかなと。これも「ベルンシュタイン問題」と言われていて、ぼくらの身体にある百以上の筋骨格系にそういう自由度があるんですけど、それを頭の中からの指令で一緒になって動かすということはなかなか難しい。百以上の自由度を頭の中の計算だけでは一斉にコントロールできない。何をやっているかと言うと、それぞれの自由度の部分がお互いに連携しながら、自由度を減じながら巧みな行動を作り上げているんだ、というのがベルンシュタインの主張なんですけど、そういうのをこれを使って研究しようというわけですね。〈Column Gear〉でYoutubeで検索していただくと、今180万アクセスぐらい、世の中の人がこのビデオを見てくれていて、いろんなコメントを書き込んでくれている。180万のアクセスだと、そのコメントの半分くらいは悪口なんですけど、「こんなものが何になるの!」というような話ですね。ただ、最近NASAが作った火星で動かそうとするロボットは「テンセグリティ」の原理で動いているんですけど、これに結構近いような感じですね。路面の状態が予測できないような場所は、ホイールで動かすよりも、こういう構造で動かしたほうが柔軟性は高いんじゃないかと思っています。
他者からの支えを上手に引き出す「非流暢さ」
(映像:相手の目線を気にしながら話す〈トーキング・アリー〉)他者からの支えを上手に引き出しながら言葉を話すというのも、とても関係論的な感じがしますよね。ぼくが今喋っているのは、皆さんの「あなたの話をちゃんと聞いていますよ」という社会的な表示、いわゆる「聞き手性」に支えられているんですけど、そういう意味では、自分で勝手にお喋りするというよりは、相手の視線を気にしながらおどおどと喋るロボットもいいなということで、〈トーキング・アリー〉というロボットを作っているところです。このロボットにはアイマークレコーダーが付いていて、正面にいる人の目線を追跡していて、ほかのことを考えていたりすると、「あのね」とか言いながら視線を引き戻そうとする。目線が今どこを向いているかによって、発話の内容を調整して、結果としては、言い直したり、言いよどんだり、言い間違えたり、フィラー(つなぎ)が入ったりということで、とても非流暢な言葉になるんですね。それは聞きにくいのかなと思ってみると、このロボットは相手の状態に合わせて発話のタイミングをはかったり、言葉を選んだりしているので、こちらに合わせて一生懸命に話してくれているような、生き物らしさとか、主体性、あるいは説得性を生み出すことができます。まだちょっと流暢に喋っちゃってるんですけど、もっと非流暢に喋るロボットを作ろうとしています。それがおばあちゃんなどに対してはやさしいコミュニケーション空間を作り上げてくれるんじゃないかなと思ってるんですね。
意志と環境による相互規定的な関係づくり
(映像:離合集散を繰り返すパネル型ロボット〈INAMO〉)これもアート系の人であれば興味を持っていただけるかもしれませんので、紹介してみます。これは〈INAMO〉というロボットで、離合集散を繰り返すようなパネル型のロボットなんです。こういう変形の六角形を接合する中で、平面充填形状になっているらしいんですけど、パネルを張り合わせるように、平面を作り出すことができます。電磁石をスイッチングすることでお互い接続しあって形を変える。内部は扁平のモーターによってフライホイールが高速に回転していて、フライホイールの回転を減速、加速させるときに生まれる慣性モーメントを使って外殻のロボットを動かすというものですね。だんだん、その数を増やしながら今いろんなこと試みているところです。もともとやりたかったのは、人が踏み石のように踏んで歩くようなものなんですが、人に踏まれちゃった〈INAMO〉は動けないんですけど、他の部分がぱたぱたと動いて前に進む。前に進んだときに、環境からの制約を受けると、どちら方向に動いていいかという計算を、彼らが自分の身体を使って行き当たりばったりにやるんです。これが創発的な計算になっているんですけど、そこで何となく作られた形に引き出されるように、人の一歩が引き出される。そうすると、人の意志と環境からの制約とが相互規定的な関係で次に進むべき方向を作り上げていく。これは実はぼくらの身体がやっている振る舞いに非常に近いので、なかなか面白いんじゃないかというわけなんですよね。
「並ぶ関係」でのコミュニケーション
(映像:一緒に並んで歩く〈マコのて〉 )〈ゴミ箱ロボット〉や〈トーキング・アリー〉などは、人からの支えを上手に引き出すという非対称の関係を考えてきたんですけれど、お互いに支えつつ支えられるという対称の関係になったらどうなの、ということで、一緒に並んで歩く〈マコのて〉というロボットを作ったりしてます。これも最初はどっちに行っていいのかわからないような、なにかまどろっこしいロボットですね。聞き分けのない犬を連れて歩いているような感じで、どこに興味があるのか分からない。はじめはぎくしゃくとしているんですけど、だんだんお互いの好みが、行動の癖が分かってきて、ロボットも人に適応するし、人もロボットに適応すると、何となくお互いに調整がうまくいって、「あ・うん」の呼吸で次に進むべき方向がだんだん分かってくる。そうすると、ぼくの考えていることが、ロボットに伝わっているようにも見えるし、ロボットからも何となく何か伝わってくる、そういう関係をうみだせないか。これを使って、「並ぶ関係でのコミュニケーション」を研究できないか、ということを考えています。
人とロボット、相互の歩み寄りによるプロトコルの獲得
(映像:「コンコン」というノック音の意味を獲得・共有することを行う〈Sociable Dining Table〉)今日は、もう一つだけ紹介して終わりにしたいと思います。先ほどの〈む~〉などは、おかあさんの「はーい、げんき?」という語り掛けに対して、「うぐー」という喃語というか、非分節音を使って言葉のやり取りをしているんですけど、あのときに「うぐー」という言葉の意味がだんだん獲得できる、あるいは分節化されると面白いんですよね。ただ、言葉の意味とか、言葉の意味を獲得させるってとっても大変なので、もっとシンプルなところでやろうということで、今ぼくらが試みてきたのは、テーブルの上を動くコーヒーポットやお皿、ランプ。それに対して、人がコンコンとノックを打つんですね。それが一個の「コン」なのか、二個の「コンコン」なのか、三個の「コンコンコン」なのか、そういう「コンコン」の意味やコミュニケーションのプロトコルがはじめから決められていると研究にもなんにもならないんですけど、はじめはお互いにプロトコルが分からない、共有されていない状況でどうなるかという話をしています。「コンコン」というシンボルの意味を人とロボットのあいだで獲得・共有できたら楽しいというわけですね。コーヒーポットとか、お皿、あとランプなんかが机の上で動いている。これはピクサーの「ルクソーJr.」に影響を受けて作ったものです。「コンコン」とやると、前に進んでいいのか、後ろに戻るのか、右に曲がるのか、お互いに疑心暗鬼な状態でよく分からない、ということで、何度か遊んでみるわけです。ロボットのほうも、人の抱いているであろうルール体系に歩み寄ろうとするし、人のほうも、ロボットの持っているルールに歩み寄ろうとする。そういうふうに相互に適応しあう中で、いつかはそれが収束するんじゃないか。そうすると、そのロボットたちに関わる人それぞれで獲得されるプロトコルが違う、オリジナルな、ユニークなプロトコルが見出される。そんな仕事です。二個のときに前に進む、とか、三個のときは右に曲がる、とか、最初はばらばらだったものがだんだんと対応関係が生まれてくる。学習の最初では、「コンコン」の回数によって意味が分離されていない、いわば非分節音の状態なんですけど、それが学習が進んでくると、二個のときには前で、一個のときは左で、三つのときは右だ、というふうに「コンコン」の意味が枝分かれし、分節していく。こういうことをしていくと、人とロボットとのあいだで、オリジナルな言葉の意味とかプロトコルが生み出されるのではないか。「テーブルの上でお皿が動いて、なにかうれしいことがあるのか?」と学会などでよく言われるんですけど、テーブルの上でなくても何でもよくて、今、情報機器がどんどん複雑になるにつれてマニュアルとかも厚くなって、使い方がなかなか分かりにくいんですけども、このようなシンボルの分節化ということを考えると、マニュアルがない状態で、おばあちゃんと情報機器とが遊びながら、オリジナルなシンボル体系やインタフェースのプロトコルを作り上げるという可能性が生まれてきているので、そういう応用に使えるのではないか、という話をしています。
と、これまでいろいろと雑駁な話をしてきましたので、上手にメッセージが伝わったかどうかは分かりませんが、ここで一応終わりにしたいと思います。どうもご清聴ありがとうございました。
ーー質問者1 機能を追加していくことで逆に疲弊していく、というような日本企業の問題について指摘されていましたが、そうではない方向性としてどんなものがあるとお考えでしょうか?
ものづくりの世界で言うと、「なしくずしの機能追加主義」ということで、一つのものとか一つのシステムにいろんな機能を作り込みすぎているんじゃないか。そこで人との関わりが非常に窮屈になったり、関係性がすごく脆くなる、あるいは多様性が落ちてるんじゃないかということで、むしろ引き算する中で、周囲や人との関係性を志向するなかで、あたらしい可能性なり、柔軟性なり、新しい価値が生まれてくるといいんじゃないかなと思っています。
今、いろんな世界で「~をしてくれる人」あるいは「~をしてもらう人」というふうに、例えば「お掃除をしてくれる人」「お掃除をしてもらう人」というふうに、お互いの間に線を引いてしまうことが多い。で、その線を引いた途端に、相手に対する要求水準をどんどん高めてしまうという感じがするんですよね。だからさっきのお掃除ロボットがもっと完璧に仕事をするとなったときにどうなるかと言うと、「もっと静かにできないの?」「もっと速くできないの?」「この取りこぼしはどうなのよ」というふうに相手に対する要求水準をどんどん上げてしまうことが多いんですね。それが今世の中のいろんなところで起こっているんじゃないかというふうに感じていまして、個体の機能を追求する中で見失いつつあるものがいろいろあるんじゃないか。その中の一つとしては、最近になって耳にしたことばで「レジリエンス」ということがあります。自己責任という言葉がありますが、相手に責任を一方的に押し付けちゃったりすると、社会としてのレジリエンスが失われてしまうとか、「なしくずしの機能追加主義」が企業を疲弊させている。あるいは企業で社員個人の成果のみで給料を決めるというような成果主義になったあたりから、何か日本企業の元気が無くなってきたとかですね。
あるいは過度のモジュール化によって、電気さえあればなんとでもなる、オール電化のマンションと言っていた話が、電気が途絶えてしまうと何も出来ない。過度のモジュール化によって、だんだんシステムが脆くなっているような感じがするんです。このあいだの原発事故なんかもそうだとおもうんですけれど、予想していた以上にシステムが脆かった。同様に社会システムがどんどん脆くなっているとか、あるいは自己責任とかで人と人との関係性が脆くなっていたり、子どもでも大人でもぎりぎりまで追い込まれて、人が折れやすくなっているのかなと。これは個体能力主義とか「なしくずしの機能追加主義」…お互いの中でお互いに線を引いてしまう、というところから来ているんじゃないか。そうすると、もうちょっと関係性を指向するようなものづくりというか、社会システムということを考えると、もっとレジリエンスというものを回復できるんじゃないか。そんな議論につながるかなと最近は思っています。
ーー質問者2 岡田先生の立場から見て、IAMASという研究機関がこのような分野においてどのような形で貢献できるとお考えになりますか?
いろんな側面で期待されていると思っているんですけど、例えばロボットの世界に限定して考えてみても、ロボットを作っている人の多くというのは、技術系の出身の人が非常に多くて、とてもキカイキカイしたロボットを平気でお年寄りの前に差し出してしまうんですよね。そうすると大変なことになるとか、子どもたちと関わるロボットを技術屋さんのセンスで作られちゃうと、とんでもない状況になってしまう。産業振興という意味では、ロボットが次の世代の産業振興の要だと言われているんですけれど、無遠慮に介護現場にどんどん堅物のようなロボットを持ち込んでしまうという現状があると思うんですよね。そこで、姿や形状のデザインだけではなく、関係性のデザインとか、コトのデザインだとかですね、そういうことはやっぱりデザイン系のセンスをもっている人じゃないとできないと思っているので、そういう要素が今の世の中で比重が大きくなっているかなと。単に効率性とか正確さとか最適性を求める社会じゃなくて、関係性の質を高める社会になってきているので、そこに皆さんの活躍の場がますます広がってきているんじゃないかと、ぼくは外から眺めているだけなんですけど、そういうことを期待したいと思っております。何か優等生の答えになっちゃいましたね(笑)。それは正直なところで、われわれにはなかなか、このデザイン系のところがうまくいっていないと思っています。